

前回の記事(その1)では、カメラの手ぶれ補正について、各社で用いられている名称の違いについて解説した。今回はその補正性能を表す用語について解説しよう。
「5軸手ぶれ補正」や「補正効果4.0段」のような言葉を目にしたことはあるだろうか。これらはカメラボディまたはレンズに搭載された、手ぶれ補正機構の性能を表す言葉である。具体的な数字が入っているために数字の大小が性能に関連しそうなことは想像できるが、それらが何を表しているのかを具体的に解説していきたいと思う。
まずは補正する手ぶれの種類を紹介しよう。図1にあるように、手ぶれには次の3つの種類がある。
1. 角度ぶれ(2軸)
前後・左右に傾くことによって起きる2軸方向のぶれのこと。前後方向は”ピッチ”、左右方向は”ヨー”と呼ばれる。3種類の手ぶれのうち、最も大きな問題になるのがこの角度ぶれであり、その1で紹介した「レンズ内手ぶれ補正」の多くは角度ぶれのみを補正している。余談だが、左右方向の角度ぶれの”ヨー”と、船舶運行時の掛け声”ヨーソロー”はまったく関係のない言葉で、ヨーはぶれ(=方向転換)を表すがヨーソローは直進の意味があるらしい。
2. シフトぶれ(2軸)
縦横にずれることによって起きる2軸方向のぶれのことで、図では横方向をX、縦方向をYとしている。シフトぶれはマクロレンズ等を使った近接撮影で問題になりやすく、一部のレンズではシフトぶれ補正に対応している。
3. 回転ぶれ(1軸)
レンズの光軸を中心にしてカメラが回転する方向のぶれであり、この方向はロールと呼ばれる。回転ぶれはシャッターボタンを押す動きが大きすぎることで発生する。回転ぶれはすべてが光軸対称となっているレンズ側では補正できないため、「ボディ内手ぶれ補正」によって補正される。
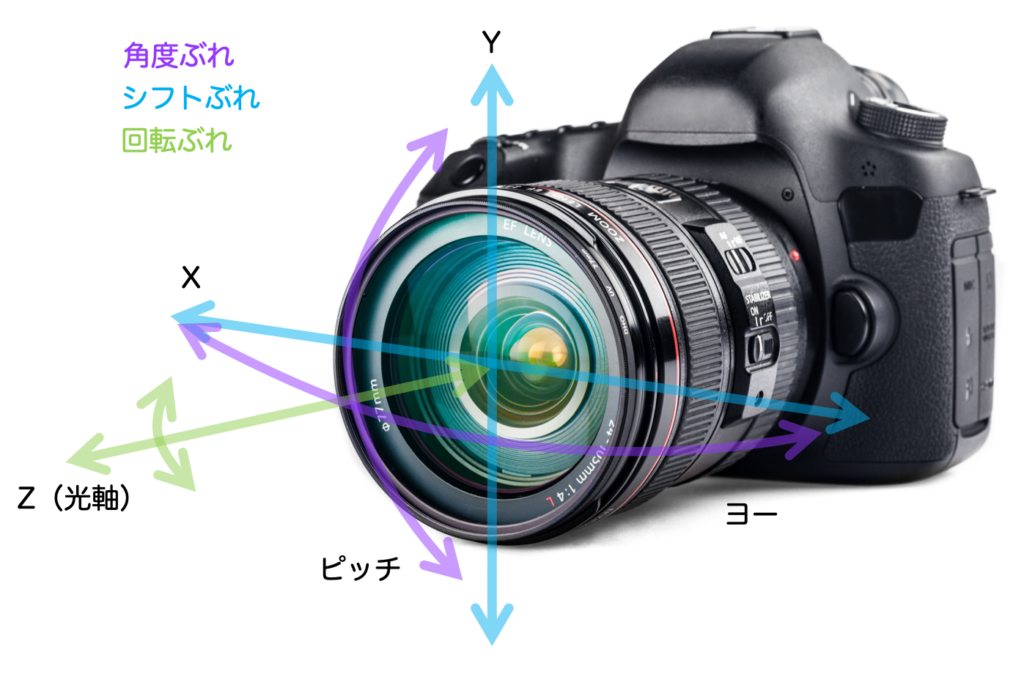
図1:カメラボディと手ぶれれの種類
すなわち手ぶれは5軸方向に発生することになる。3次元の剛体が取り得る動きの自由度は全部で6軸(6自由度と呼ばれる)あるが、残りの1軸はカメラが前後方向(図1内のZ方向)にずれることで発生する「シフトぶれ」に相当し、これはレンズのピント調整によって補正できる。よって上記5軸方向の補正機能があれば、原理的には手ぶれをなくすことができる。この5軸方向すべてに対して手ぶれ補正機構が対応している場合、メーカーは「5軸手ぶれ補正機構を搭載」という表現でアピールしている。なお、5軸すべてを補正できるのは「ボディ内手ぶれ補正」だけであり、「レンズ内手ぶれ補正」では角度ぶれ2軸、またはそれにシフトぶれ2軸を加えた4軸を補正している。
今回は補正すべき手ぶれの種類について概観を紹介したが、次回はこの手ぶれ補正の”良し悪し”を測る指標について解説する。
趣味は天文と写真と車。大学では天文サークルに所属し、暗い空を求めて日本中を飛び回っていた。 天文学を極めるために大学院に進学、在籍中は中間赤外線分光器の開発に従事。 カメラやレンズに関する記事を主に担当。
この監修者の記事一覧