

本シリーズでは、各社におけるカメラの手振れ補正機構について、名称の違いから性能の指標について解説をしてきた。前回に引き続き、手振れ補正機構の各種原理について解説する。
これまでの記事については以下より復習いただきたい。
各社における名称の違い 各社のカメラ用語の違い1:手ぶれ補正 その1
手振れ補正の性能を表す用語 各社のカメラ用語の違い1:手ぶれ補正 その2
手振れ補正の性能を表す用語(その2の続編) 各社のカメラ用語の違い1:手ぶれ補正 その3
レンズ内手振れ補正の原理 各社のカメラ用語の違い1:手ぶれ補正 その4
今回はボディ内手振れ補正について解説する。
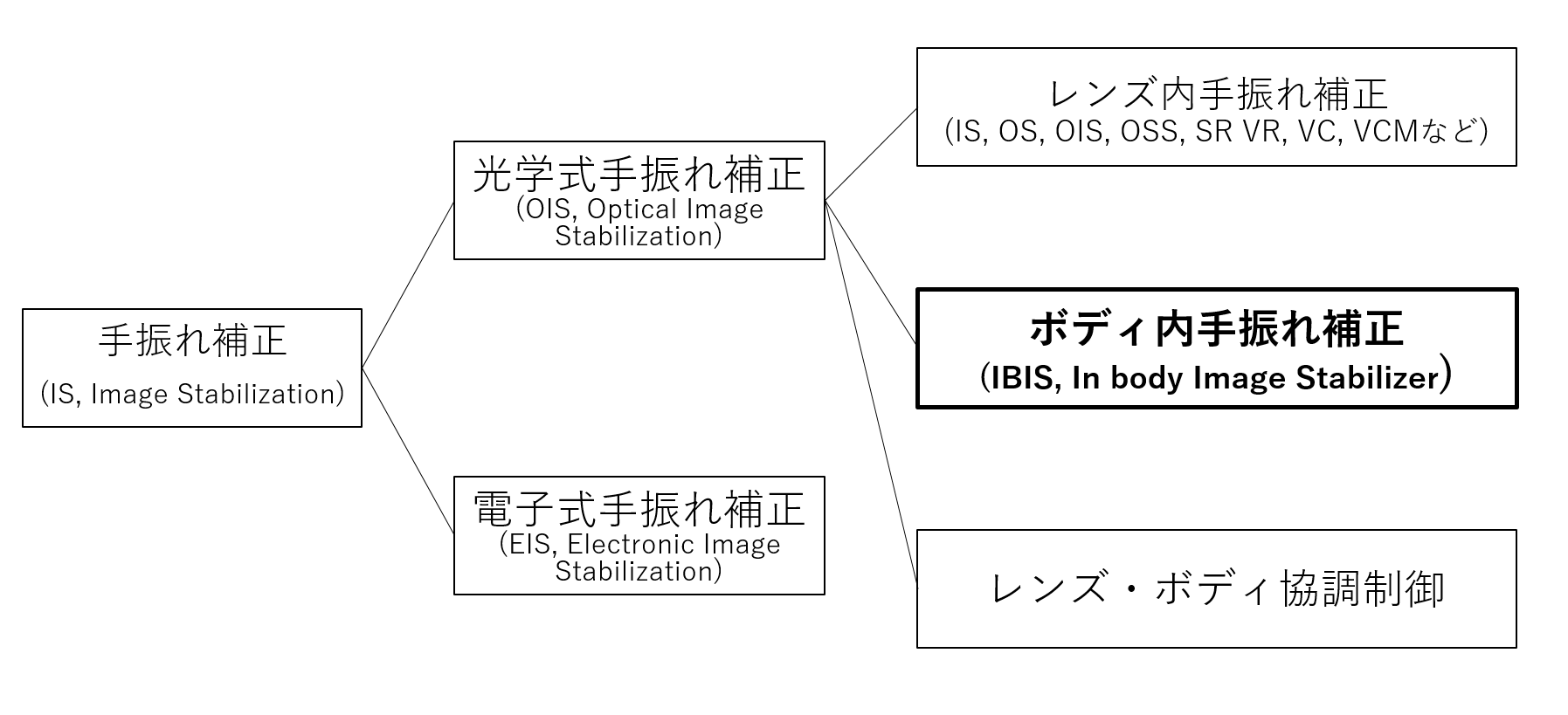
図1:手振れ補正の種類
ボディ内手振れ補正では、カメラボディ内に搭載したジャイロセンサーや加速度センサーを利用して揺れ具合を検知し、それをキャンセルする向きにイメージセンサーを動かすことで手振れを補正する(このため「イメージセンサーシフト方式」とも呼ばれる)。イメージセンサーは通常、カメラボディに対してガッチリと固定されているが、ボディ内手振れ補正機構を搭載するカメラはアクチュエータによってセンサーを自由に動かせる構造になっている。駆動方向は、X・Y方向のシフト2軸と、ピッチ・ヨー・ロール方向のチルト3軸の、計5軸方向に動かすことが可能である(図2)。この5つの中でも、特にロール方向については、その4で紹介したレンズ内手振れ補正機構では補正することができないため、ボディ内手振れ補正機構の大きな強みである。
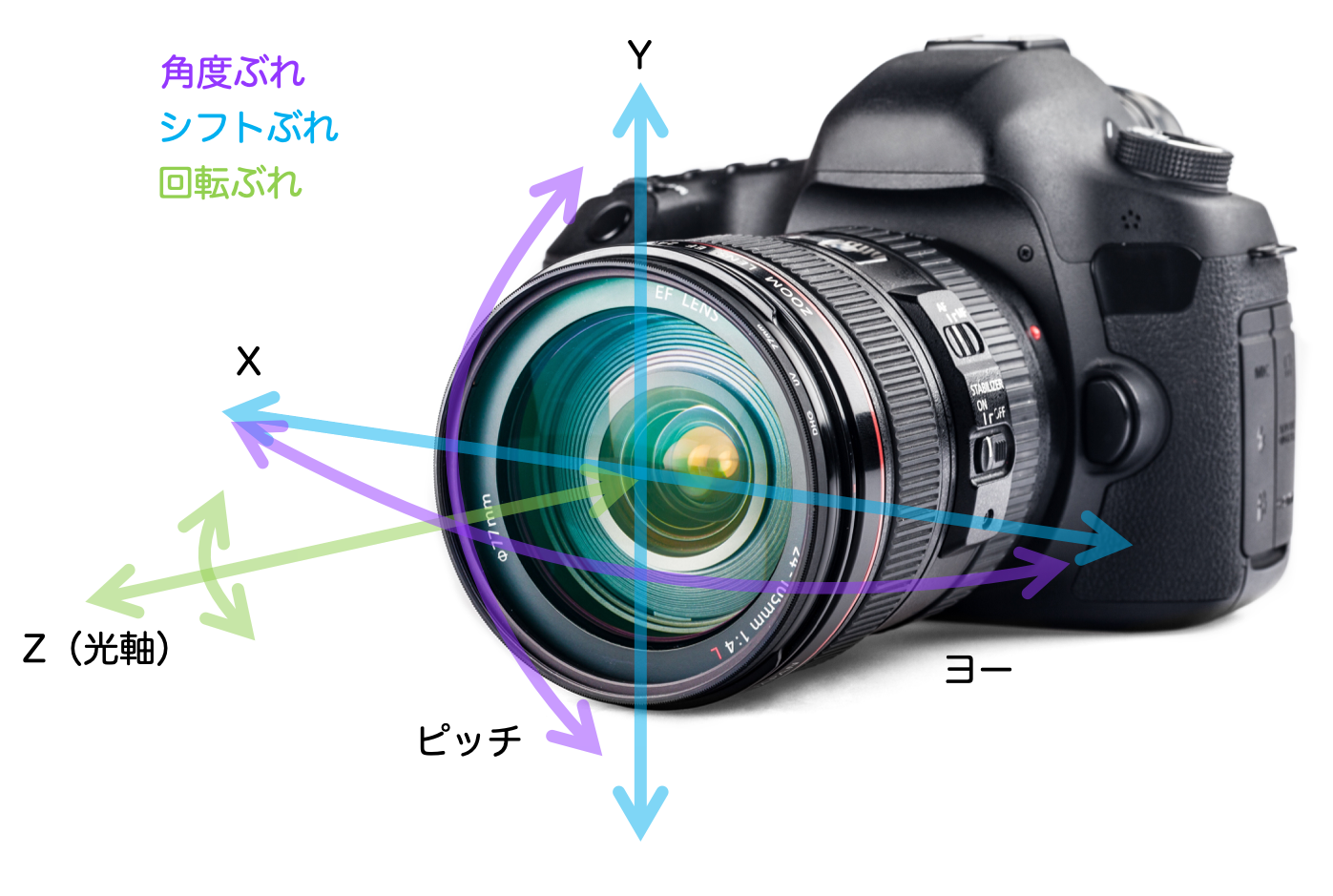
図2:ボディ内手振れ補正で補正可能な軸
ボディ内手振れ補正のメリットとデメリットは以下のとおりである。
【メリット】
・X・Y方向のシフト2軸、ピッチ・ヨー・ロール方向のチルト3軸に対する5軸手振れ補正が可能
・レンズ側に手振れ補正機構が無い場合でも、ボディ側で手振れ補正が可能なため、オールドレンズを含む全ての取り付け可能なレンズに対して手振れ補正機能が使用できる
・センサーを動かせるようになった副産物として、自動水平補正や構図微調整機能、GPSユニットと組み合わせた天体追尾機能、センサーをわずかに移動させて撮影した複数枚の画像を合成することによる高解像度画像の生成機能などが使用可能
【デメリット】
・カメラボディのサイズが少し大きく(厚く)、重くなる
・高価になる
・光学式ファインダーでは手振れ補正効果が確認できない(電子ビューファインダーの場合は確認可能)
・超望遠レンズ使用時は十分な手振れ補正効果が得られない(注)
(注)メーカーや個々人の手振れの癖にもよるが、焦点距離200-300mmまでのレンズであればボディ内手振れ補正だけで十分補正が可能である。しかしそれ以上の超望遠レンズでは、ぶれ角が同じであっても焦点距離が長くなるために、像面における被写体の移動量、すなわち補正に必要なセンサー移動量が大きくなり、センサーの可動域が足りなくなるため十分補正しきれなくなる。
次回はレンズ・ボディ協調制御について解説する。
趣味は天文と写真と車。大学では天文サークルに所属し、暗い空を求めて日本中を飛び回っていた。 天文学を極めるために大学院に進学、在籍中は中間赤外線分光器の開発に従事。 カメラやレンズに関する記事を主に担当。